


 中国教育在线
中国教育在线


11月7日,大连理工大学力学与航空航天学院、工业装备结构分析优化与cae软件全国重点实验室解兆谦教授(共同通讯作者)与美国西北大学john a. rogers教授课题组、黄永刚教授课题组及西湖大学姜汉卿教授课题组合作,在《自然》(nature)上发表了题为“基于生物弹性状态恢复的触觉感官替代”(bioelastic state recovery for haptic sensory substitution)的研究论文。这是解兆谦教授继2022年作为主要作者在《科学》(science)发表“外周神经可逆传导阻滞的柔软且生物可吸收冷却器”(soft, bioresorbable coolers for reversible conduction block of peripheral nerves)一文后取得的又一项重要成果。

该研究发明了一种基于生物弹性状态恢复的无线、低功耗、多刺激模式触觉皮肤电子器件,通过力-电-磁控制的双稳态及压扭耦合结构力学设计,可实现对皮肤不同深度触觉机械感受器的动态和静态、法向力和剪切力的多模式激励。该可编程多模式触觉激励的皮肤电子器件在视觉、平衡感和触觉感官替代中存在广阔的应用前景。
人体皮肤中多样的机械触觉感受器能感知并传递丰富的触觉信息。在社交媒体、游戏、娱乐及生物医学康复治疗中,快速可编程的触觉激励器应用广泛且潜力巨大,能有效替代或增强人体感知能力。然而,现有触觉激励器功耗高、模式单一,仅能激活皮肤中单一类型的机械触觉感受器,且多为有线控制,限制了使用的便捷性和应用的广泛性。为充分挖掘触觉界面的应用潜力,需要皮肤中多类型机械感受器的协同参与,以实现多感官互动,这对可穿戴触觉激励/感官替代器件的开发提出了新的挑战。
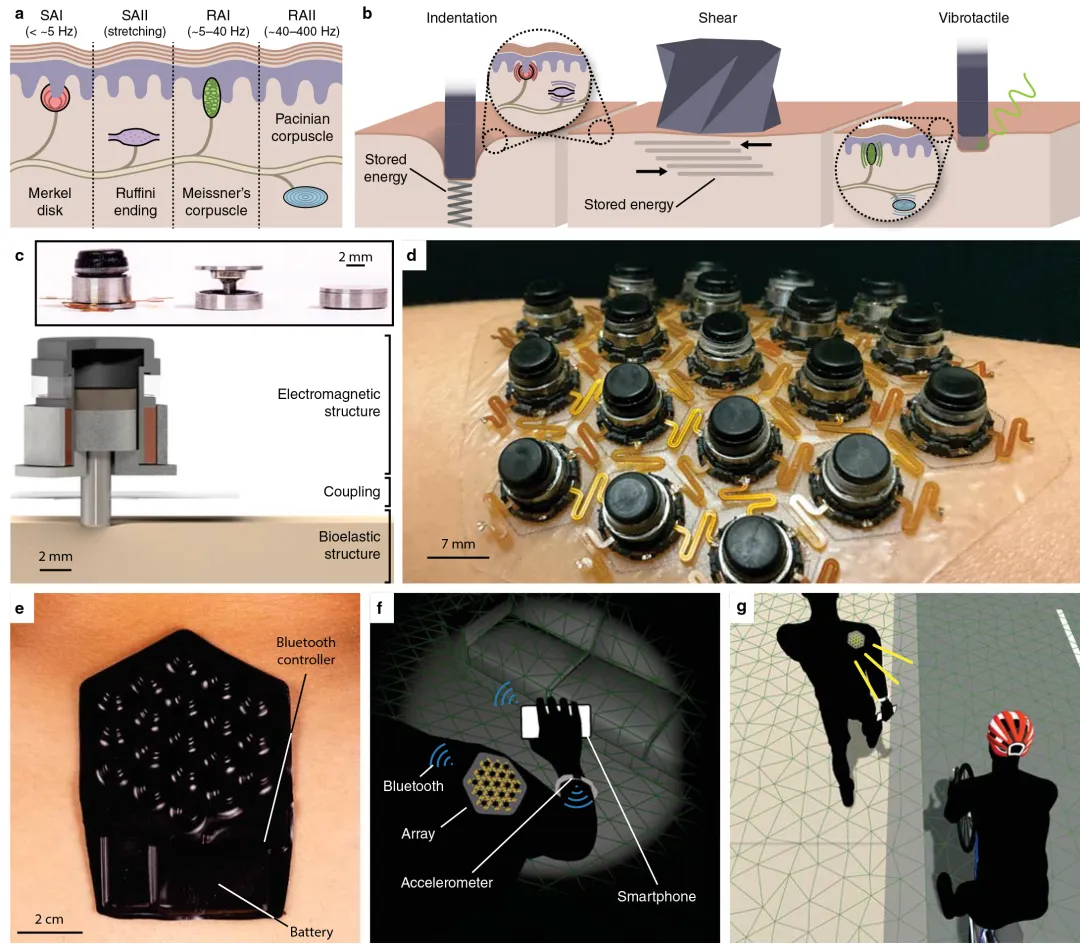
图1 用于多感官替代的无线、低功耗、多刺激模式触觉皮肤电子器件
针对上述业界广泛关注的挑战性难题,该文创新性设计了一种基于生物弹性恢复的无线、可编程、低功耗且具备多刺激模式的触觉皮肤电子器件(见图1)。该器件凭借其独特的力-电-磁控制双稳态结构,能够在瞬态微电流的作用下,于压缩与放松两种状态间实现快速且精准的切换,实现皮肤不同层面的静态与动态的激励(见图2)。同时,器件集成的压扭力学结构,结合先进的kirigami设计,巧妙地实现了对皮肤剪切力与法向力的耦合作用,极大地丰富了触觉激励的多样性和精准度(见图2),为用户带来了更为真实、细腻的触感体验。此外,该器件采用了轻质的柔性延展力学结构设计,使得整体轻薄且易于穿戴,完美实现了与皮肤的无缝保形贴合,提升了用户的舒适度,确保了器件在长时间使用过程中的稳定性和可靠性。最为重要的是,该器件集成了先进的无线控制电路系统,能够根据前方障碍物、使用者身体姿势及步态等实时信息,智能地调整激励模式。这种智能化的设计使得器件能够为用户提供更为个性化、精准且实时的触觉反馈,从而在视觉、平衡感和触觉感官替代等领域展现出广阔的应用前景。
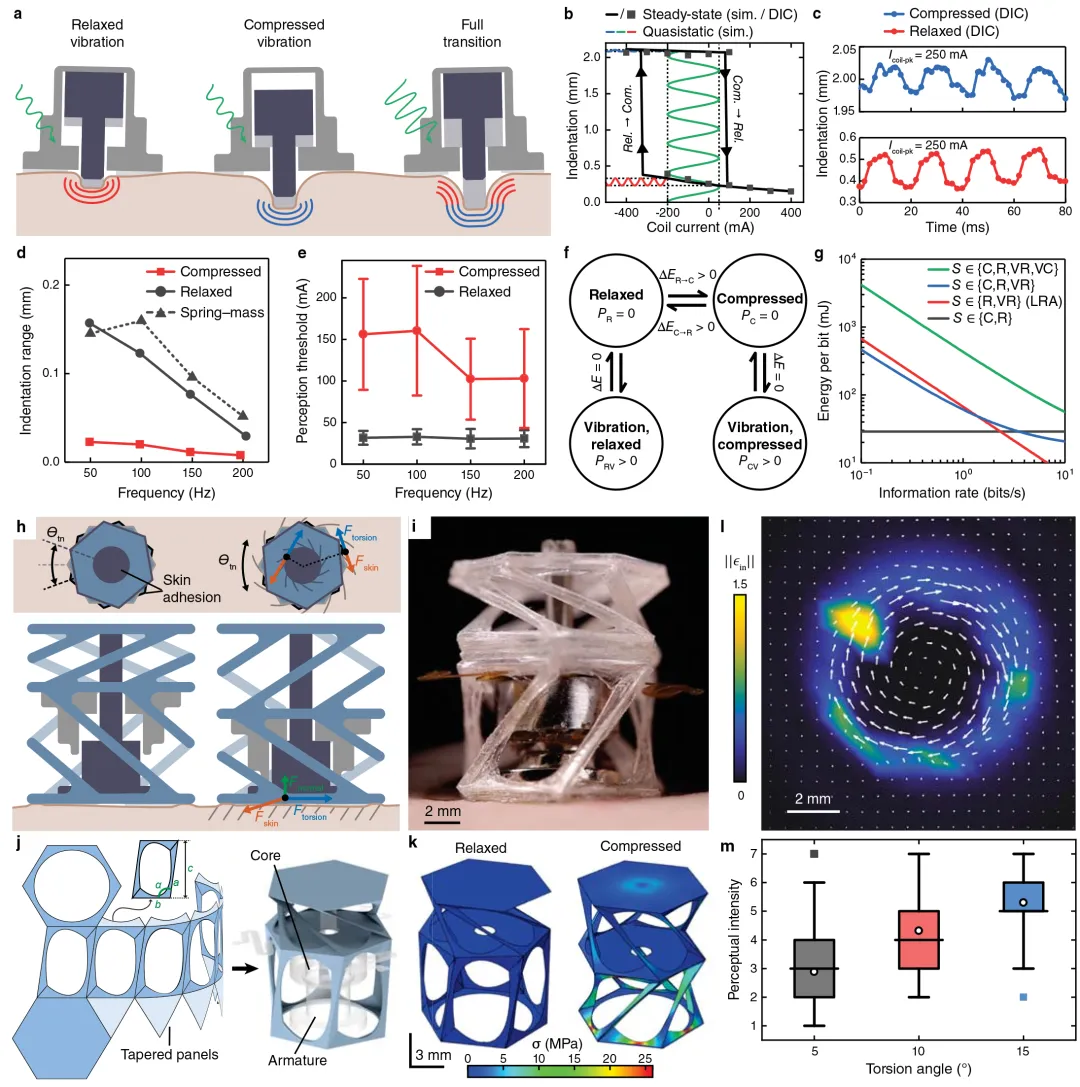
图2 力-电-磁控制的双稳态及压扭耦合力学结构设计
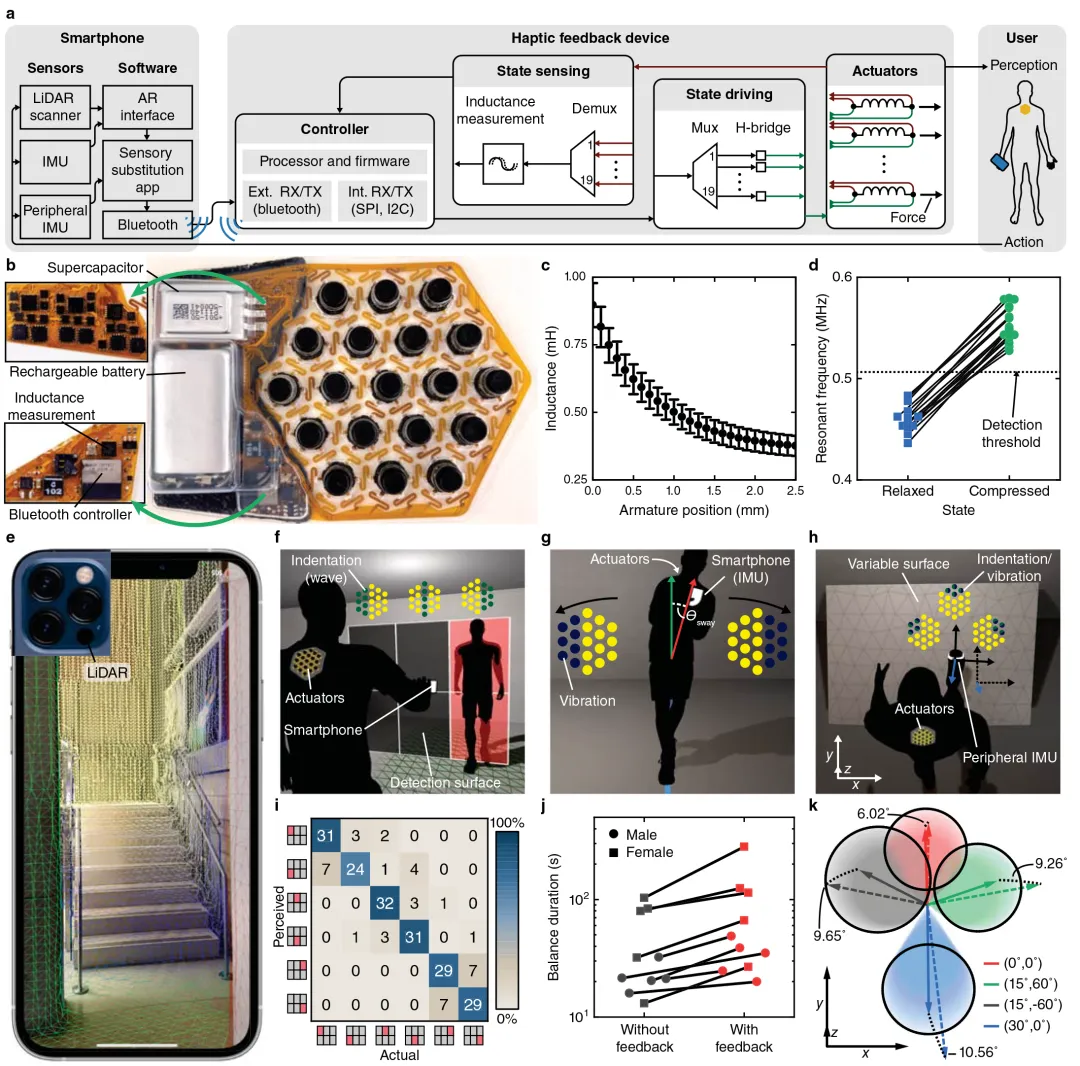
图3 感官替代人体测试
经过人体测试实验(见图3),确切地证明了以下几点:首先,通过智能手机的lidar技术感知前方障碍物,并与触觉皮肤电子器件协同工作,能够为视力障碍者提供精确且可靠的导航指引(见图3f)。其次,利用智能手机内置的惯性测量单元(imu)实时监测用户的身体姿势变化,并与触觉皮肤电子器件相结合,可以为用药后等平衡感受损的患者提供平衡感官替代方案(见图3g)。最后,通过imu精准追踪脚步的方向以及与地面的相对角度,配合触觉皮肤电子器件,可以辅助糖尿病脚部感官缺失的患者调整步态,有效预防跌倒,从而实现对其脚部感官功能的精准替代(见图3h)。
论文链接:https://www.nature.com/articles/s41586-024-08155-9
① 凡本站注明“稿件来源:中国教育在线”的所有文字、图片和音视频稿件,kok登录的版权均属本网所有,任何媒体、网站或个人未经本网协议授权不得转载、链接、转贴或以其他方式复制发表。已经本站协议授权的媒体、网站,在下载使用时必须注明“稿件来源:中国教育在线”,违者本站将依法追究责任。
② 本站注明稿件来源为其他媒体的文/图等稿件均为转载稿,本站转载出于非商业性的教育和科研之目的,并不意味着赞同其观点或证实其内容的真实性。如转载稿涉及kok登录的版权等问题,请作者在两周内速来电或来函联系。